Lijn (meetkunde)
Een lijn of rechte is een eendimensionale structuur zonder kromming, bestaande uit een continue onbegrensde aaneenschakeling van punten. Een lijnstuk is de kortste verbinding tussen twee punten. In Vlaanderen wordt rechte meer gezegd dan lijn.
Afhankelijk van de context worden in de wiskunde verschillende definities gebruikt. Een nauwkeurige definitie van een lijn en van een punt geven is echter moeilijk, daarom worden in de meetkunde lijnen en punten als basisbegrippen beschouwd. In de wiskunde strekt een lijn zich tot in het oneindige uit en is per definitie recht. Een kromme is een lijn, die niet recht is, en is volgens de hier gegeven definitie geen lijn.
Er zijn drie soorten rechten te onderscheiden:
- de lijn, een rechte die aan beide kanten onbegrensd doorloopt,
- een halve lijn, ook wel halfrechte of straal, aan één kant begrensd, aan de andere kant oneindig doorlopend en
- een lijnstuk, begrensd door twee punten, met een lengte.
Representatie

Er zijn verscheidene manieren om een lijn vast te leggen:
- door twee punten en van de lijn te geven, ligt de lijn vast,
- een andere veelgebruikte methode is een punt op de lijn en een richtingsvector te geven,
- door in een cartesisch assenstelsel een vergelijking van de lijn te geven en
- met poolcoördinaten.



Parametervorm
Als in een -assenstelsel de punten en gegeven zijn door:
- ,

is

de parametervergelijking van die lijn.
Dit kan ook als
- ,

worden geschreven, wat overeenkomt met de voorstelling door middel van het punt en de richtingsvector .

Voor de beide coördinaten geldt:


Richtingsvector
Als in een -assenstelsel het punt en de richtingsvector gegeven zijn door:
- en ,


wordt de lijn in geparametriseerde vorm bepaald door:
- ,

dus door


Vergelijking van een lijn
Door eliminatie van de parameter ontstaat de algemene vergelijking voor een lijn in het -assenstelsel:


Deze kan voor worden geschreven als:


Voor is de lijn evenwijdig aan de -as. De vergelijking is:



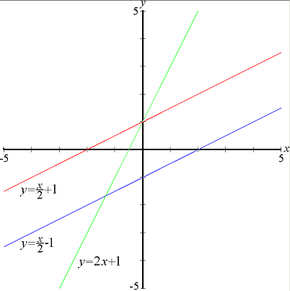
Daarin is de richtingscoëfficiënt en het intercept, de -waarde van het snijpunt van de lijn met de -as.


Normaalvergelijking van Hesse
De normaalvergelijking van Hesse beschrijft een lijn door middel van een eenheidsvector en een reëel getal . De vector is een normaalvector van met lengte een en is de afstand van tot de oorsprong. Het inproduct van en een punt op is volgens de vergelijking gelijk aan :







Hierin is en is een richtingsvector van .


Poolcoördinaten
De vergelijking in poolcoördinaten van een lijn in het platte vlak die niet door de oorsprong gaat is , waarbij de afstand van de lijn tot de oorsprong is en de richting loodrecht op de lijn.



Drie dimensies
Op dezelfde manier geldt in drie dimensies voor de lijn door het punt met richtingsvector , gegeven door:
- en ,


de geparametriseerde vorm:

De coördinaatfuncties zijn:

De parameter kan ook weer hieruit worden geëlimineerd door de lijn als de snijlijn van twee vlakken op te vatten en er aan de beide vergelijkingen voor de vlakken moet worden voldaan:


Dragers
De drager van een lijnstuk is de lijn door de eindpunten van dat lijnstuk. Deze definitie geldt ook voor de lijn door het begin- en het eindpunt van een vector.
De definitie van een vlakkenwaaier in drie dimensies is de verzameling van alle vlakken door de snijlijn van twee gegeven snijdende vlakken. Die snijlijn heet ook de drager van de vlakkenwaaier.
Websites
- Wikibooks. Vectormeetkunde







