A görbe vonalú koordináta-rendszerek az euklideszi tér koordináta-rendszerei, melynek koordinátavonalai diffeomorfak a Descartes-féle koordináta-rendszer koordinátavonalaival.[1] Ez azt jelenti, hogy a megfeleltetés lokálisan egy-egyértelmű, és a megfeleltetés, valamint az inverz megfeleltetés is differenciálható. Tehát nem lehet például szakadás vagy töréspont a koordináta-vonalakon.
A leggyakrabban alkalmazott görbe vonalú koordináta-rendszerek:
A szóban forgó feladattól függően egy megfelelően választott görbe vonalú koordináta-rendszerben a számítások egyszerűbbek lehetnek, mint a Descartes-koordináta-rendszerben. Például a sugaras szimmetriájú feladatokhoz célszerűbb lehet a gömbkoordináták választása.
A következők elsősorban a háromdimenziós térre vonatkoztathatók, ám nagy részük általánosítható más dimenziókra is.
A Descartes-koordináták transzformációja
Egy -dimenziós tér egy pontjának koordinátái egy valós számokból álló -es, amely a pontot a koordináta-rendszer erejéig határozza meg.
A Descartes-féle koordináta-rendszerben az koordináták felírhatók az új koordináták folytonosan differenciálható függvényeként:
, , …
Ez egy egyenletrendszer, ami invertálható, tehát megoldható az koordinátákra:
, , …
ha az inverz funkcionáldetermináns nem nulla vagy végtelen:
.
Az inverz transzformációnak is folytonosan differenciálhatónak kell lennie.
A transzformáció reguláris azokban a pontokban, melyeknek egyértelmű a megfeleltetése. A többi pontban szinguláris. Ekkor teljesül, hogy ha egy pont adott az Descartes-koordinátákkal, akkor az inverz transzformációkkal egyértelműen kiszámíthatók a pont görbe vonalú koordinátái. A tér minden reguláris pontja egyértelműen leírható az Descartes-koordinátákkal és ekvivalensen, az görbe vonalú koordinátákkal.
Egy transzformációegyenletekre vonatkozó tétel szerint a fent leírtak alapján a Descartes-féle koordináta-rendszerrel együtt definiálható egy görbe vonalú koordináta-rendszer.
Koordinátavonalak, -felületek és tengelyek
Itt ui helyett qi: koordinátavonalak, -felületek és tengelyek (egy kiválasztott hely bázisvektorai szerint)A gömbkoordináta-rendszer koordinátavonalai, -felületei és tengelyei. Felületek:r – gömbök, θ – kúpok, φ – félsíkok; Vonalak:r – egyenes sugarak, θ – vertikális félkörök, φ – horizontális körök; Tengelyek:r – egyenes sugarak, θ – érintők a vertikális félkörökhöz, φ – érintők a horizontális körökhöz
Ebben a szakaszban a háromdimenziós térben szemléltetjük a koordinátavonalakat, -felületeket és tengelyeket.
A koordinátafelületek megkaphatók egy koordináta rögzítésével és a többi változtatásával:
ahol
Minden nem szinguláris ponton át az felületsereg egy tagja halad át.
A koordinátavonalak úgy kaphatók, hogy két koordinátát rögzítünk, azaz ahol , és a harmadik koordináta fut:
ahol
A fenti feltétel azt jelenti a funkcionáldetermináns számára, hogy a háromdimenziós tér minden pontján át három koordinátavonalnak kell áthaladnia, különben a pont nem reguláris.
Például a gömbkoordináták esetén a -tengely pontjaiban az összes sík metszi egymást (ahol az azimut). Így a -tengely pontjainak koordinátái nem egyértelműek: , de tetszőleges.
Ha a különböző koordinátavonalak derékszögben metszik egymást, akkor a koordináta-rendszer ortogonális.
A koordinátatengelyeket a koordinátavonalak érintőiként definiáljuk. Ez a Descartes-féle koordináta-rendszertől és az affin koordináta-rendszerektől különböző koordináta-rendszerekben azt jelenti, hogy a tengelyek függnek a helytől. Emiatt helyi koordinátákról beszélünk.
Különböző bázisok
Egy vektor koordinátákkal való ábrázolásához bázisra van szükség. Ehhez egy -dimenziós térben független vektorra van szükség. Egy ilyen bázissal a tér bármely vektora előállítható lineáris kombinációként, ahol is a kombináció együtthatói a vektor koordinátái.
Csak egyenesvonalú esetben állandóak a bázisvektorok; valóban görbe vonalú koordináta-rendszer esetén a bázis, így a koordináták is függenek a helytől. Emiatt ezeket a bázisokat helyi bázisoknak nevezik. Mind a bázisvektorok, mind a koordináták helyfüggők. Egyenes vonalú koordináta-rendszerekben a bázis globális, azaz nem függ a helytől. A helytől kizárólag a koordináták függnek.
Helyi bázis előállítására két módszer létezik:
kovariáns bázis
kontravariáns bázis
A két bázis reciprok, illetve duális egymással. Holonóm bázisoknak is nevezik őket. Különböznek abban, hogyan transzformálódnak koordinátaváltáskor – a két transzformáció inverze egymásnak.
Az adott sokaság minden pontjában egyidejűleg létezik mindkét bázis. Így egy tetszőleges vektor ábrázolható egyikben vagy másikban. Az kontravariáns koordinátákat kombinálják a kovariáns bázisvektorokkal, és az kovariáns koordinátákat a kontravariáns bázisvektorokkal.
Ez a keresztbe párosítás biztosítja, hogy vektor a koordinátatranszformáció során invariáns maradjon, mivel a bázis és a koordináták inverz módon transzformálódnak, így kölcsönösen kiegyenlítik egymást. A fizikában a vektorok ezen tulajdonsága alapvető, mivel a fizika törvényeinek a koordináta-rendszer választásától függetlennek kell lenniük. Ilyen például egy részecske sebessége.
Egy vektor (koordinátavektor) kontravariáns, ha a koordináták kontravariánsak, és a bázis kovariáns. Egy vektor (koordinátavektor) kovariáns, ha a koordináták kovariánsak, és a bázis kontravariáns.
Kovariáns bázis
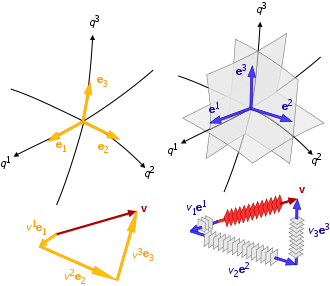
Egy v vektor (pirossal) • egy vektorbázisban (sárgával, balra:e1, e2, e3), érintővektorok a koordinátagörbékhez (feketével) és • egy kovektor bázisban vagy kobázisban (kékkel, jobbra:e1, e2, e3), normálvektorok a koordinátafelületekhez (szürkével) általános (nem feltétlenül ortogonális) görbe vonalú (q1, q2, q3) koordinátákban. A bázis és a kobázis nem egyezik, kivéve, ha a rendszer ortogonális[2]
A kovariáns bázis vektorai minden pontban érintőlegesek valamelyik koordinátavonalhoz.
Normált és természetes bázis
A koordinátavonalak érintő-egységvektorai bázist alkotnak, ami kovariáns bázisvektorokból áll:
Ezek az egységvektorok a helytől függően fordulnak irányba.
A skálázási tényezők definíciója:
, így
A nem normált vektorok alkotják a természetes bázist, amiből a normálással a normált bázis nyerhető. Itt a természetes bázis vektorait jelöli, a normált bázis vektorait pedig .
Kontravariáns koordináták
Az új bázisokkal az összes vektor kifejezhető a normált kovariáns bázisban, illetve a természetes bázisban:
ahol illetve kontravariáns koordináták, melyek iránya az -koordinátavonal felé mutat; a normált, a természetes bázisban. A tenzoranalízisben a koordinátákat felső indexszel jelölik. Ez nem hatványozást jelent.
Egy vektorkoordináta hossza megfelel a normált bázisban a koordináta abszolútértékének, a természetes bázisban pedig az koordináta abszolútértékének és a vektorhossz szorzatának:
Ha a vektor fizikai mennyiséget jelöl, akkor a természetes bázis hossza tartalmazhat mértékegységet is, ami így összeszorzódik a koordinátákkal. Ez körülményes lehet. Normált bázis esetén azonban a mértékegység teljes egészében a koordinátán múlik. Ezért az koordináták fizikai koordináták, és a normált bázisvektorok fizikai bázisvektorok.
Megkülönböztetésként az koordináták holonóm koordináták, és a természetes bázisvektorok holonóm bázisvektorok.
A bázisvektorok és koordináták viselkedése a transzformáció során, Jacobi-mátrix
Helyi kovariáns bázis transzformációja általános görbe vonalú koordináták esetén
A természetes bázisvektorok definíciójából következően az koordináták transzformációja koordinátákká adódik a képlet:
A természetes bázisvektorok egyszerűen viselkednek a transzformáció során. Normált bázis esetén a skálázási tényezőkkel is számolni kell:
Egy tetszőleges vektor kifejezhető mjnd a régi, mind az új bázisban:
Így kapható a koordináták viselkedése a transzformáció során:
Míg a kovariáns vektorok esetén a Jacobi-mátrixszal végezhető, a kontravariáns koordináták transzformációjához a Jacobi-mátrix inverzét kell alkalmazni.
A tenzoranalízisben a vektorok viselkedését a fenti transzformációs viselkedéssel definiálják. Maga a helyvektor nem vektor, de a helyvektor-differenciál már igen.
A Descartes-féle koordináták transzformációjának Jacobi-mátrixa megegyezik azzal a mátrixszal, melyben a természetes bázis oszlopvektorokként szerepel:
Az inverz funkcionáldeterminánsra vonatkozó feltétel a következő kapcsolattal jellemezhető:
Ez megfelel az inhomogén lineáris egyenletrendszernek a -re. A koordinátái tartalmazzák a görbe vonalú bázisvektorok koordinátáit. Az egyenletrendszer csak akkor oldható meg egyértelműen, ha a mátrix magja nulladimenziós, azaz az oszlop- illetve sorvektorok lineárisan függetlenek. Ez ekvivalens azzal, hogy a mátrix determinánsa nullától különbözik. Ez egyértelműen meghatározza az ismeretleneket, azaz minden ponthoz egy, és csak egy bázis létezik.
A duális bázis hasonlóan megfeleltethető a fenti mátrix inverzének.
Metrikus tenzor és Gram-determináns
A természetes bázisvektorok skalárszorzatai definiálják a metrikus tenzor komponenseit:
Vegyük észre, hogy a metrikus tenzor a skaláris szorzás kommutativitás miatt szimmetrikus:
Emiatt a metrikus tenzornak független komponense van, és nem . Három dimenzióban a független elemek száma 6.
A metrikus tenzor írható, mint a Jacobi-mátrix és transzponáltjának szorzata:
A mennyiségek metrikus együtthatók, melyek segítségével kiszámítható egy vektor hossza a kontravariáns koordinátákból. Ehhez kellenek a skálázási tényezők.
A skálázási tényezőket a átlós elemek adják meg, mivel :
A metrikus tenzor determinánsa a Gram-determináns:
következménye, hogy a Jacobi-mátrix determinánsa abszolútértékének meg kell egyeznie a Gram-determináns négyzetgyökével. Másként,
,
ahol az előjel a bázis irányításától függ. A normált bázisvektorokból alkotott determináns a multilinearitás miatt adja, hogy:
A metrikus tenzor inverzére teljesül a Cramer-szabály miatt, hogy:
ahol az adjungált és a Gram-determináns. A kifejtési tételből következik, hogy:
és az inverz metrikus tenzorra:
Ortogonális koordináta-rendszerek
Ha az -dimenziós térben minden nem szinguláris pontban az koordinátavonal mindegyike merőlegesen metszi egymást, akkor a koordináta-rendszer ortogonális. Ekkor az vektorok az tér ortonormált bázist alkotnak:
, (Kronecker-delta)
A természetes bázisvektorokra:
Így az ortogonális bázisvektorok esetén a metrikus tenzor diagonális:
Az inverz metrikus tenzor ortognális koordináták esetén:
A Gram-determináns is egyszerűbb:
A természetes, illetve normált bázisvektorok esetén a determináns:
Háromdimenziós tér
Ha az ortonormált bázis jobbkezes, akkor teljesülnek a következők:
Általában a görbe vonalú koordináta-rendszerekben nincs globális bázis, mivel a koordinátavonalak nem egyenesek. Globális bázis csak abban a speciális esetben létezik, hogyha a koordinátavonalak egyenesek. Ekkor a koordinátafelületek síkok, seregeik párhuzamos síkseregeket alkotnak. Ekkor a transzformációs egyenletek így alakulnak:
ahol és konstansok. A Jacobi-mátrix megfelel az transzformációs mátrixnak. Így a természetes egységvektorok alkotják az mátrix -edik oszlopát.
Duális bázis: kontravariáns bázis
A kontravariőns bázisvektorok minden pontban merőlegesek a megfelelő koordinátafelületekre. Duálisak a kovariáns bázisvektorokra. Egy vektor kontravariáns komponensei megkaphatók a kontravariáns bázisvektorokra való vetítéssel.
Ortogonális koordináták
A vektor kontraviariáns koordinátái egy ortonormált bázis számára megkaphatók vetítéssel:
Nem derékszögű koordináta-rendszerekben egy vektor egy kovariáns koordinátája megkapható a vetítéssel a megfelelő kovariáns koordinátára. Ez nem a kontravariáns koordináta, mivel nem teljesül a reláció, azaz a metrikus tenzor nem diagonális. Ehhez szükség van a duális tér és a duális bázis fogalmára.
Duális tér és duális bázis
Az érintővektorok vektorterének duális tere azokból a lineáris funkcionálokból áll, amelyek a vektorokat az alattuk levő testre képezik le: . A duális tér egy bázisát alkotják a -hez duális bázisvektorok. A duális bázisvektorokat úgy definiálják, hogy .
Definiáljuk továbbá a következő bilineáris formát: . Ez az úgynevezett duális párosítás. Így a duális bázisvektorok hatása a bázisvektorokra:
Véges dimenziós tér esetén izomorf -hez, azaz . Az euklideszi térben (ami skalárszorzattal ellátva) a duális párosítás azonosítható az
skalárszorzattal, így a duális vektorok azonosíthatók vektorokként. Itt és illetve .
Duális bázis
A duális bázist úgy definiálják, hogy a (kovariáns bázisvektorok) és a (kontravariáns bázisvektorok, jelen esetben normált bázisvektorok) skaláris szorzata:
.
legyen. Hasonlóan, a természetes bázisvektorokra és duális bázisvektoraikra:
.
A természetes bázisvektorokra és duális bázisvektoraikra mátrixjelöléssel:
Mivel a kovariáns bázisvektorokból, mint oszlopokból alkotott Jacobi-mátrix megfelel annak, hogy , azért a kontravariáns vektorokból, mint sorvektorokból alkotott mátrixnak az inverz Jacobi-mátrixnak kell lennie:
Tehát a duális bázisvektorok megkaphatók a Jacobi-mátrix invertálásával.
A kontravariáns bázisvektorok Gram-determinánsa megegyezik a kovariáns bázisvektorokból alkotott mátrix determinánsának inverzével:
Kovariáns komponensek
Az új bázisban az összes kifejezhető a (normált), illetve a természetes bázisban:
Itt illetve kovariáns vektorkomponensek, ami a illetve koordinátafelületek normálisának irányába mutat. A tenzoranalízisben indexeit alsó indexbe írják.
A koordináták mint a bázivektorokra vett vetületek
Egy vektor kontravariáns koordinátáját az bázisvektorra vett vetítéssel kaphatjuk; ez a kontravariáns bázis, a tenzoranalízisben felső indexet használva ():
Ortonormális bázisvektorok esetén a ko- és kontravariáns bázisvektorok megegyezne, így a ko- és kontravariáns koordináták is.
Általában, egy tetszőleges vektor ábrázolható ko- és kontravariáns bázisban:
Így a kontravariáns bázis a kovariáns koordinátákkal, és a kovariáns bázis a kontravariáns koordinátákkal kombinálódik. Ez a tulajdonság megőrzi a vektorokat a koordináta-rendszer megváltoztatásakor.
Mindkét oldalt megszorozva -vel kapjuk, hogy:
Így a metrikus tenzorok és inverzük segítségével az kontravariáns koordináták átvihetők a kovariáns koordinátákba és vissza. A tenzorok nyelvén: az index emelhető és süllyeszthető.
Ortogonális koordináták
Ortogonális koordináta-rendszerekben egybeesnek a bázisvektorok és a duális bázisvektorok normáltjai. Ez a természetes bázisokra azt jelenti, hogy a megfelelő bázisvektorok párhuzamosak, és egy faktorszorosa az egyik a másiknak:
Normált bázisok esetén a koordináták megegyeznek:
Három dimenzióban
Három dimenzióban a duális bázisvektorok kifejezhetők a bázisvektorok vektorszorzatát elosztva a bázisvektorok illetve vegyes szorzatával:
Kompaktabban, a normált bázisvektorokkal:
és a természetes bázisvektorokkal:
Míg a (kovariáns) bázisvektorok érintik a koordinátavonalakat, addig a (kontravariáns) duális bázis vektorai merőlegesek a koordinátafelületekre. Például, ha és része egy koordinátafelületnek, akkor erre az merőleges.
Megfordítva, a kontravariáns bázisvektorokkal hasonlóan kifejezhetők a kovariáns bázisvektorok. Tehát a vektorszorzatot elosztjuk a illetve vegyes szorzattal:
Ha a kovariáns vektorok jobbsodrású bázist alkotnak, akkor a kontravariáns bázisvektorok is jobbsodratú koordináta-rendszert alkotnak. A két determináns szorzatának ugyanis egynek kell lennie.
Tenzorok
Egy -fokú tenzor kifejezhető - vektor tenzorszorzataként:
A tenzorszorzás nem kommutatív, így a vektorok sorrendje nem cserélhető fel. Az skalárok az alaptest elemei, tehát , melyek koordinátatranszformáció során nem változtatnak értéket: . A skalárok nulladfokú, a vektorok elsőfokú tenzorok.
A vektorok kétfélék lehetnek, ko- és kontravariáns módon ábrázolhatók, ami -edfokú tenzorok számára lehetőséget biztosít. A vektorokkal történő ábrázolással a vektorok tulajdonságait a tenzorok is öröklik. Így például metrikus tenzorokkal az indexek emelhetők és süllyeszthetők, azaz a ko- és kontravariáns ábrázolások egymásba átvihetők. Az indexek emelésével és süllyesztésével egymásból kapható tenzorok egymás asszociáltjai. A tenzorok átveszik a vektorok transzformációval szembeni viselkedését, így a kovariáns részek úgy transzformálódnak, mint a kovariáns vektorok, tehát a Jacobi-mátrixszal, és a kontravariáns részek úgy, mint a kontravariáns vektorok, tehát a Jacobi-mátrix inverzével.
Másodfokú tenzorok
Egy másodfokú tenzor négyféleképpen ábrázolható:
A négy eset: (tiszta) kontravariáns, (tiszta) kovariáns, kontra-kovaráns, ko-kovariáns.
Az egységtenzor, melyet az egyenlőség definiál:
Skalárszorzat
Két vektor skalárszorzata:
Ez megfelel a másodfokú tenzor kontrakciójának egy nulladfokú tenzorra.
Harmadfokú tenzorok
Egy harmadfokú tenzor nyolcféleképpen ábrázolható:
Három dimenzióban a teljesen antiszimmetrikus tenzor adódik, mint:
Az első reláció a Descartes-féle írásmód, a következő kettő pedig a görbe vonalú tenzorverzió leírásai közül kettő.
A bázisvektorok deriváltjai
A bázisvektorok deriváltjai görbe vonalú koordináta-rendszerekben a következőképpen különböznek a Descartes-féle koordináta-rendszerekben megszokottól. Mivel általában a koordinátagörbék nem egyenesek, és a bázisvektorok függenek a helytől, a bázisvektorokat is differenciálni kell. A szorzatszabályt alkalmazva:
Illetve a természetes bázisban:
Christoffel-szimbólum
Az bázisvektor egy koordináta szerinti deriváltja kifejezhető a bázisvektorok lineáris kombinációjával:
A együtthatók másodfajú Christoffel-szimbólumok.
A mennyiségek elsőfajú Christoffel-szimbólumok. Egy természetes bázisvektor teljes differenciálja:
Egy vektor deriváltja kifejezhető Christoffel-szimbólumokkal:
Itt a második egyenlőségjelnél felcseréltük az és indexeket, mivel mindkettőre összegzünk, és felbontottuk zárójeleit.
Kovariáns derivált
Erre alapozható egy vektor kovariáns deriváltja:
Az első term az vektormező komponensének megváltozását írja le az koordinátatengely mentén, a második a mező megváltozását, amit a koordináta-rendszer változása von magával. Egyenes vonalú koordináta-rendszerekben, ahol a metrikus tenzor konstans, a Christoffel-szimbólumok eltűnnek, és a kovariáns derivált megegyezik a parciális deriválttal.
A kovariáns derivált a sokaság geometriájának további geometriai szerkezetét tárja fel, ami lehetővé teszi különböző vektorterek és érintőterek vektorainak összehasonlítását. Így a kovariáns derivált különböző vektorterek differenciálgeometriai összefüggését állítja elő. Ez ahhoz szükséges például, hogy kiszámítsák egy görbe görbületét. Ehhez a és vektorok differenciálhányadosát kell képezni, melyek különböző vektorterekben élnek.
A metrikus tenzorok kovariáns deriváltjának koordinátái eltűnnek: .
A kovariáns deriválttal általánosíthatók az irány szerinti deriváltak:
Például ha egy görbe egy Riemann-sokaság geodetikus vonala, akkor definíció szerint két pont között a legrövidebb összekötő vonal a sokaságon belül, ami kifejezhető az geodetikus differenciálegyenlettel. Ez azt jelenti, hogy az görbe sebesség-vektormezője (érintő-vektormezője) konstans a görbe mentén. Ez a definíció annak felel meg, hogy geodetikus vonalai egyenesek. A görbe görbülete így eltűnik, így az érintővektor deriváltja is nulla végig a görbe mentén. Lokális koordinátákkal a geodetikus differenciálegyenlet:
A Christoffel-szimbólumok a affin összefüggés koordinátái. Ha az együtthatók adottak, akkor megadtuk, hogy a sokaságban hogyan változnak pontról pontra a koordináta-rendszerek. Lehet, hogy több információnk van a térről és a benne levő differenciálható sokaságról, így tudjuk, hogy mit értünk kovariáns differenciáláson, így a Christoffel-szimbólumok meghatározhatók. Az utóbbi esetben be kell látni, hogy Riemann-sokaságról van szó, és a sokaság minden érintőtere skalárszorzat, így metrikát indukál, tehát van távolság.
Mivel a tekintetbe vett sokaságok (szemi)-Riemann-sokaságok (itt eltűnik a torziótenzor), azért a összefüggés egy Levi-Civita-összefüggés, vagyis torziómentes, illetve szimmetrikus, és emellett még metrikus összefüggés is. Torziómentessége miatt az antiszimmetrizált irány menti derivált megegyezik a Lie-deriválttal. Míg az irány menti derivált lineáris az iránymezőben, azért az Lie-derivált egy argumentumában sem lineáris.
A Christoffel-szimbólumok tulajdonságai
Schwarz tétele, illetve a torziómentessége miatt a Christoffel-szimbólumok szimmetrikusak két alsó indexükben:
Ez alapján a Christoffel-szimbólumok a metrikus együtthatók alapján:
Ez következik abból a relációból, hogy:
és két permutációjából, azaz -ból és -ből.
A duális bázisvektorok deriváltjára a következő összefüggést kapjuk:
Ez alapján a kovariáns komponensek kovariáns deriváltjai:
Fontos megjegyezni, hogy a Christoffel-szimbólumok három indexükkel nem írnak le harmadfokú tenzort, mivel nem mutatják a tenzoroknál megkövetelt viselkedést a transzformációkkal szemben:
A transzformációs formulában szereplő második tag miatt nincs szó tenzorról. Emiatt a Christoffel-szimbólumokat jelölik úgy is, hogy ne lehessen tenzornak nézni őket:
A transzformációval szembeni viselkedésről tett kijelentés általánosítható: Egy tenzor parciális deriváltjának indexe () úgy transzformálódik, mint egy kovariáns index (). Ezzel szemben egy második parciális derivált indexei () közül egyik sem transzformálódik tenzorindexek módjára. Kiutat a kovariáns derivált jelent: Egy tenzorkoordináta -edik kovariáns deriváltja újra tenzorkoordináta, kovariáns index módjára transzformálódik. Például ebben: és kovariáns indexek.
Görbe vonalú koordináták három dimenzióban
Vektorszorzat és alternáló tenzor
Descartes-koordinátákban a vektorszorzás az Levi-Civita szimbólummal:
Görbe vonalú koordináták esetén az
alternáló tenzor használható:
Ez levezethető abból, hogy :
A következő számításból látható, hogy tenzorként viselkedik a transzformációkkal szemben. A kovariáns verzió:
A vektorszorzat a normált bázisban:
Koordinátafelületek: belső geometria
Az általánosság megszorítás nélkül feltesszük, hogy az koordinátafelületről van szó. A felület egy nem normált normálvektora kollineáris a kontravariáns bázisvektorral:
Konvenció szerint -ben egy felületet a belső geometria következő mennyiségeivel definiálhatjuk. Azért belső geometriai jellemzők, mivel megállapíthatók a felületen belül szög- és távolságméréssel (lásd első alapforma):
Ortogonális koordinátákban , tehát .
A felület metrikus tenzora és ennek Gram-determinánsa:
A felület funkcionáldeterminánsa:
ahol a felület normált normálvektora.
Az inverz metrikus tenzor:
Koordinátafelületek: Külső geometria
A következőkben a görög betűs indexek az 1,2 értékeket veszik fel, és a felület koordinátáit és bázisvektorait jelölik.
A szerinti parciális deriváltja előállítható a felület bázisvektorainak lineáris kombinációjaként. Ez következik a normálási feltételből a deriváltból következően. Így ortogonális az felületi normálisra, ennélfogva a felületben kell lennie. Bevezetünk egy másik mennyiséget is, ami másodfokú tenzor:
A szakirodalom a tenzort másodfokú felülettenzornak, görbületi tenzornak vagy felülettenzornak nevezi. A kovariáns koordináták számítása:
ahol . Ez írható úgy is, mint:
lásd második alapforma.
A értékek kapcsolatba hozhatók a másodfajú Christoffel-szimbólumokkal. A helyettesítéssel:
Innen a Gauß-Weingarten-egyenletek:
A második alapforma függ a felület helyzetétől a körülvevő térben, és a görbületi számításokhoz szükséges. A vegyes, kontravariáns-kovariáns tenzor segítségével:
a főgörbületek ( sajátértékei), középgörbület és a Gauß-görbület is számítható.
A Riemann-féle görbületi tenzor kifejezhető a tenzorszorzattal. További integrabilitási feltételek a Mainardi-Codazzi-egyenletek.
Integrációs elemek három dimenzióban
Görbeelem
Egy vektoriális útelem vagy görbeelem kifejezhető a helyvektor teljes differenciáljaként:
Az koordinátavonalak iránya menti differenciálok azonosíthatók:
Ügyeljünk arra, hogy indexe nem jelez kovarianciát. A vektoriális útelemek segítségével ív- felület- és térfogatelemek határozhatók meg.
Ívelem
A skaláris útelem vagy hosszelem, illetve ívelem definíció szerint
Normált bázisvektorokkal:
Az ortogonális koordináták esetén:
és
Speciálisan, ha a görbe a síkban fut, akkor az első alapforma:
Felszínelem
Egy koordinátafelület felszíneleme:
Az előjelet az irányítás adja meg. A mennyiséget skaláris felszínelemnek nevezik.
Az általánosság megszorítása nélkül tekinthetjük az koordinátafelületet:
Normált bázisvektorokkal:
Ortogonális koordináták esetén:
Térfogatelem
A térfogatelem:
ahol azonosítható a funkcionáldetermináns abszolútértéke.
Normált bázisvektorokra:
Ortogonáls koordinátákban:
Differenciáloperátorok három dimenzióban
Az ortogonális koordináta-rendszerek speciális esete több különböző szempontból is fontos, például mérnökök és fizikusok számára. Többek között azért, mert a leggyakrabban használt görbe vonalú koordináta-rendszerek, például a gömbi és az elliptikus, ortogonálisak. Más szempontból azért is fontosak, mert itt nem kell foglalkozni a kovariáns, a kontravariáns, a duális, a gamma-együttható és további kapcsolódó fogalmakkal. Továbbá a bázisok mindig ortogonálisak, habár nem mindig normáltak. Ortonormált rendszert a normált bázisok alkotnak. A normált vektorokat jelöli.
Ortogonális koordináta-rendszerekben a következő differenciáloperátorokat adják meg: gradiens, divergencia, rotáció, Laplace-operátor. Egy függvény gradiense megadja a függvény legnagyobb meredekségét, a skalármező, illetve vektormező a forrás- és örvénysűrűséget jelenti. Jelentésük független a koordinátáktól.
A skalárfüggvény gradiense:
Vegyük észre, hogy nemcsak , hanem minden megnevezett mennyiség, köztük a bázisvektorok és a együtthatók is függhetnek u-tól.
Egy vektormező divergenciája:
Egy vektormező rotációja:
A Laplace-operátor:
Tehát nem elég a helyettesítést elvégezni, hanem alkalmazni kell a definíciót. A fent megadott eredményeket a gyakorlatban egyszerűbben is megkaphatjuk ha a már meglevő koordinátafüggetlen definíciókat használjuk.
Konform leképezés
Két dimenzióban több hasznos koordináta-rendszert konform leképezéssel hoztak létre. Ezek nemcsak hogy derékszögűek, hanem szögtartóak tetszőleges szögre. Ez azt is jelenti, hogy két bázisvektor hosszának aránya mindig egy, például k-tól függetlenül, különben a gömbből ellipszoid lenne.
Differenciáloperátorok általános koordináta-rendszerben
A következőkben a természetes bázist, és a tenzoranalízisben megszokott jelöléseket használjuk. Azaz a felső index kontravarianciát, az alsó index kovarianciát jelez. Legyen továbbá skalármező, és vektormező.
Továbbá az írásmód lesz, Christoffel-szimbólum, amit definiál. A kovariáns derivált . Skalár kovariáns deriváltja , és vektor kovariáns deriváltja , illetve .
Skalármező gradiense:
Tenzormező gradiense:
Egy fokú tenzor esetén két lehetőség adódik a gradiens definiálására:
a jobbgradiens:
a balgradiens:
.
A továbbiakban a jobbgradienst használjuk.
Vektormező gradiense:
Másodfokú tenzor gradiense:
Vektormező divergenciája:
Tenzormező divergenciája: Az fokú tenzorok esetén két lehetőség van a divergencia definiálására: a jobbdivergencia és a baldivergencia . A továbbiakban a jobbdivergenciát használjuk.
Másodfokú tenzor divergenciája:
Tenzormező rotációja:
Egy fokú tenzor esetén két lehetőség adódik a rotáció definiálására:
a jobbrotáció
és a balrotáció:
.
A továbbiakban a jobbrotációt használjuk:
Vektormező rotációja:
Skalármező Laplace-operátora:
Gradiens és totális differenciál
A következőkben a gradiens görbe vonalú koordináta-rendszerben vezetjük be. A helyvektor totális differenciálja előáll, mint:
Legyen most tetszőleges skalármező. Totális differenciálja a fenti ábrázolásával:
A gradiens definiálható, mint:
és azonosítható, mint:
Ortogonális koordinátákban egy kovariáns bázisvektor , és a hozzá tartozó duális kontravariáns bázisvektor . Így ortogonális koordinátákban a gradiens:
esetén a kontravariáns bázisvektor gradiensét kapjuk, tehát a koordinátafelület normálisának gradiensét:
Speciális Christoffel-szimbólumok
A divergencia kiszámításához szükség van a Christoffel-szimbólumra. Ez kifejezhető, mint a metrikus tenzor determinánsa:
ami következik abból, hogy és a következő összefüggésből:
Így a divergencia és a Laplace-operátor:
Koordinátafüggetlen divergencia
A divergencia koordinátafüggetlen ábrázolása a következő forrássűrűséget vezeti be:
ahol egy tetszőleges térfogat, és az áramot integráljuk a peremen. A következőkben ez egy infinitezimális paralelepipedon a pont környezetben, melyet az vektorok feszítenek ki az koordinátavonalak irányában. Ez azt jelenti, hogy koordinátái az intervallumba esnek. Az élek hossza , és az élek nem feltétlenül merőlegesek egymásra. A térfogat számítása:
A paralelepipedont az és az lapok határolják. Egy koordinátafelület felületeleme három dimenzióban:
és a vektormező helyi árama ezen a felületelemen keresztül:
így a felületen keresztülhaladó áram (mivel a vektoriális felületelem kifelé mutat, azért ):
és a felületen áthaladó áram:
itt az integrandust az helyen első rendben -ba fejtettük. A kettő összevetésével
A többi koordinátára hasonlóan:
így a divergencia a természetes , illetve normált koordinátákban:
Ortogonális koordinátákban:
Koordinátafüggetlen rotáció
A rotáció koordinátafüggetlen definíciója:
ahol tetszőleges felület az egységnormálissal, ahol az vonal menti integrál a felület pereme körül fut.
A továbbiakban egy felületet tekintünk. Így a bal oldal:
Legyen egy (infinitezimális) paralelogramma a pont körül, melyet a és vektorok feszítenek ki. Ennek terűlete .
Az integráció ennek a paralelogrammának az éleit járja körbe:
Ha , akkor -re és -ra, illetve -re és -re.
Az 1 és 3 út menti integrálok összefoglalva:
Ha az integrandust az helyen első rendben kifejtjük -re, akkor akkor a megközelített integrandus -től függ, tehát független -től, így az integrandus egyszerűen kiértékelhető:
Analóg módon, a 2 és a 4 út menti integrálra adódik, hogy:
Összevetve a cirkuláció -on belül a paralelogramma körül:
esetén a közelítésekből egzakt relációk lesznek. A rotáció definiáló egyenlőségét behelyettesítve, ha minden mennyiséget körül értékelünk ki.
Hasonló eredményeket kaphatunk a többi koordinátára is a koordináták ciklikus cseréjével. Így a rotáció azzal, hogy: :
A természetes kovariáns koordináta számítható a (természetes) kontravariáns -ből úgy, mint . A továbbiakban a normált koordináták illetve .
Ha a koordináták ortogonálisak, akkor miatt teljesül, hogy sowie . Az ortogonális normált koordinátákra , tehát ekkor a rotáció:
A rotáció mint antiszimmetrikus tenzor
A rotáció képletében feltűnnek a termek, melyek parciális deriváltakká egyszerűsíthetők, mivel a Christoffel-szimbólumok alsó indexükben szimmetrikusak:
Ez a mennyiség egy másodfokú antiszimmetrikus tenzort ábrázol, a vektor rotorja.
A görbe vonalú koordináták egyik hagyományos alkalmazását a differenciálgeometriában találjuk meg, speciálisan differenciálható sokaságok atlaszaiban. A következőkben összefüggéseket vezetünk le a differenciálformák kalkulusához, amelyek ezen számítások alapján koordinátafüggetlenül ábrázolhatók.
Differenciálformák
Legyen egy -dimenziós differenciálható sokaság. Egy -forma minden ponthoz hozzárendel egy sima alternáló -multilineáris formát a érintőtéren. Ez az egy valós értékű lineáris funkcionál, ami vektormező -saihoz valós számokat rendelnek:
Itt maga az érintőtér külső hatványának eleme, azaz eleme, mivel teljesül, hogy és . Az összes fölötti -forma halmaza, illetve a diszjunkt unió képezi az vektorteret. Ezekkel a képletekkel atlaszfüggetlenül lehet integrálni egy sokaságon.
A tenzoranalízisben antiszimmetrikus -fokú kovariáns tenzor. Lásd: alternáló -multilineáris forma.
Differenciálformák: ábrázolás koordinátákkal
Legyen nyílt része -nek, és helyi koordináta-rendszer az helyi koordinátákkal. Ekkor a helyen
a érintőtér helyi bázisa és
a hozzá tartozó duális bázis. A dualitást fejezi ki, tehát ez bázisa a koérintőtérnek. Ezek 1-formák a vektortéren. Ezeknek az 1-formáknak a -szoros külső szorzata, ahol asszociatív, bilineáris és antikommutatív, egy -forma, ahol
a koérintőtér fölötti külső algebra egy bázisa. Minden differenciálforma egyértelműen ábrázolható az összes térképen:
Például egy 2-forma:
ami megfelel egy másodfokú antiszimmetrikus kovariáns tenzormezőnek. Az esetben:
A skalár- és vektormezők kapcsolata a differenciálformákkal
Differenciálható skalármezők esetén teljesül az azonosság: az sima függvények identikusak a 0-formákkal:
A következő izomorfiával egy differenciálható vektormezőhöz egyértelműen hozzárendelhető egy 1-forma, ahol a skalárszorzat, és alkalmazzuk az Einstein-féle összegkonvenciót is:
A Hodge-Stern-operátorral egy skalármezőhöz hozzárendelhető egy -forma, és egy vektormezőhöz egy -forma.
Művelet érintő- és koérintővektorok
A flat, bé és sharp, kereszt zenei operátorok izomorfiákat írnak le, melyeket a Riemann-metrika indukál, és az érintővektorokat a koérintővektorokra, illetve megfordítva képezik le:
A tenzor notációban ez az indexek emelésének és süllyesztésének felel meg.
Hodge-Stern-operátor
Az dimenziós, irányított, euklideszi terekben létezik egy kanonikus izomorfizmus, ami a komplementer fokú ( és ) alternáló multilineáris formákat egymásra képezi le. Ez az úgynevezett Hodge-Stern-operátor:
Mindkét vektortér dimenziója .
Három dimenzióban, azaz esetén egy 0-formához hozzárendel egy 3-formát:
és egy 1-formához egy 2-formát
Így egy differenciálható vektormezőhöz nemcsak egy 1-forma, hanem egy 2-forma is hozzárendelhető. Egy differenciálható skalárfüggvényhez pedig hozzárendelhető egy 0-forma, illetve egy 3-forma is.
Egy -forma külső deriváltja egy -forma keletkezik. A zenei operátorokkal és a Hodge-Stern-operátorral képződik a De-Rham-komplexus. Két külső derivált láncolása identikus nullával. Ebből levezethetők a vektoranalízis integráltételei, a Stokes-tétel, Gauß integráltétele és a Green-tétel.
Jegyzetek
↑William M. Boothby: An Introduction to Differential Manifolds and Riemannian Geometry. 2. überarbeitete Auflage. Academic Press, 2002.
↑Gravitation. W.H. Freeman & Co (1973). ISBN 0-7167-0344-0
Források
Günter Bärwolff: Höhere Mathematik für Naturwissenschaftler und Ingenieure. 2. Auflage, 1. korrigierte Nachdruck. Spektrum Akademischer Verlag, München u. a. 2009, ISBN 978-3-8274-1688-9.
Wolfgang Kühnel: Differentialgeometrie. Kurven – Flächen – Mannigfaltigkeiten. 4. überarbeitete Auflage. Vieweg, Wiesbaden 2008, ISBN 978-3-8348-0411-2.
Siegfried Kästner: Vektoren, Tensoren, Spinoren. Eine Einführung in den Tensorkalkül unter Berücksichtigung der physikalischen Anwendung. 2. verbesserte Auflage. Akademie-Verlag, Berlin 1964.
Murray R. Spiegel, Dennis Spellman, Seymour Lipschutz: Vector Analysis. Schaum’s Outlines. 2. Auflage. McGraw-Hill, 2009, ISBN 978-0-07-161545-7.
Heinz Schade, Klaus Neemann: Tensoranalysis. 3. überarbeitete Auflage. de Gruyter, Berlin 2009, ISBN 978-3-11-020696-8.
Klaus Jänich: Vektoranalysis. 5. Auflage. Springer-Verlag, Berlin 2005, ISBN 978-3-540-23741-9.
Fordítás
Ez a szócikk részben vagy egészben a Krummlinige Koordinaten című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
























































![{\displaystyle {\underline {\underline {J}}}={\frac {\partial (x_{1},x_{2},\ldots ,x_{n})}{\partial (u_{1},u_{2},\ldots ,u_{n})}}=\left({\begin{array}{cccc}\partial x_{1}/\partial u_{1}&\partial x_{1}/\partial u_{2}&\ldots &\partial x_{1}/\partial u_{n}\\\partial x_{2}/\partial u_{1}&\partial x_{2}/\partial u_{2}&\ldots &\partial x_{2}/\partial u_{n}\\\vdots &\vdots &&\vdots \\\partial x_{n}/\partial u_{1}&\partial x_{n}/\partial u_{2}&\ldots &\partial x_{n}/\partial u_{n}\end{array}}\right)=\left({\begin{array}{cccc}|&|&&|\\{\vec {b}}_{u_{1}}&{\vec {b}}_{u_{2}}&\ldots &{\vec {b}}_{u_{n}}\\|&|&&|\end{array}}\right)\equiv [{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5db6f62458e26ac98fdd91460f916361a1e2e9d)













![{\displaystyle {\underline {\underline {g}}}={\underline {\underline {J}}}^{T}{\underline {\underline {J}}}=[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]^{T}[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]=\left({\begin{array}{ccc}{\vec {b}}_{u_{1}}\cdot {\vec {b}}_{u_{1}}&\ldots &{\vec {b}}_{u_{1}}\cdot {\vec {b}}_{u_{n}}\\\vdots &&\vdots \\{\vec {b}}_{u_{n}}\cdot {\vec {b}}_{u_{1}}&\ldots &{\vec {b}}_{u_{n}}\cdot {\vec {b}}_{u_{n}}\end{array}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2994cd79d3472f88bd63a3429650105aeea0918b)







![{\displaystyle \det[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]\equiv \det J=\pm {\sqrt {g}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f04da35a1146737d842ee177c802393fc72334e)
![{\displaystyle \det[{\vec {e}}_{u_{1}},{\vec {e}}_{u_{2}},\ldots ,{\vec {e}}_{u_{n}}]=\det[h_{u_{1}}^{-1}{\vec {b}}_{u_{1}},h_{u_{2}}^{-1}{\vec {b}}_{u_{2}},\ldots ,h_{u_{n}}^{-1}{\vec {b}}_{u_{n}}]={\frac {\det[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]}{h_{u_{1}}h_{u_{2}}\cdots h_{u_{n}}}}={\frac {\pm {\sqrt {g}}}{h_{u_{1}}h_{u_{2}}\cdots h_{u_{n}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/913f59e132d536a875b3bd7cff792c4b72ab087c)














![{\displaystyle \det[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]={\sqrt {g}}=h_{u_{1}}h_{u_{2}}\cdots h_{u_{3}}\quad \iff \quad \det[{\vec {e}}_{u_{1}},{\vec {e}}_{u_{2}},\ldots ,{\vec {e}}_{u_{n}}]=1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c8dbb2dc92ac48136ad6ea0125adb25375f97372)















![{\displaystyle f\colon \ V\rightarrow K,\ {\vec {v}}\mapsto f[{\vec {v}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b82ffe9599445d35cb42a01a11d4df655e54c0c7)
![{\displaystyle {\vec {e}}_{i}^{\,*}[{\vec {e}}_{j}]=\delta _{ij}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6c0658fe3e59a7e6ca55acc312b2cac25c2e20a9)
![{\displaystyle \langle \cdot ,\cdot \rangle \colon \ V^{*}\times V\rightarrow K,\ \langle f,{\vec {v}}\rangle =f[{\vec {v}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cce9bc4bc47df72d50fc99372c7dedbf0fbe0a86)














![{\displaystyle [{\vec {b}}_{u_{1}}^{\ *},{\vec {b}}_{u_{2}}^{\ *},\ldots ,{\vec {b}}_{u_{n}}^{\ *}]^{T}[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]={\underline {\underline {E}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/39efb2609f63076cc25f59679aa3972a36d881d6)
![{\displaystyle {\underline {\underline {J}}}=[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\ldots ,{\vec {b}}_{u_{n}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/02fd902ef5b6def82a959c51a8d1a13914666755)
![{\displaystyle {\underline {\underline {J}}}^{-1}=[{\vec {b}}_{u_{1}}^{\ *},{\vec {b}}_{u_{2}}^{\ *},\ldots ,{\vec {b}}_{u_{n}}^{\ *}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2265b4be2579759fba8e5395f7a6b6763d15d1e9)
![{\displaystyle \det[{\vec {b}}_{u_{1}}^{\ *},{\vec {b}}_{u_{2}}^{\ *},\ldots ,{\vec {b}}_{u_{n}}^{\ *}]^{T}=\det(J^{-1})={\frac {1}{\det(J)}}={\frac {1}{\sqrt {g}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8ef27f6bc11c9dfcc332b7cdb6784531b7f0e38)




































![{\displaystyle \epsilon _{ijk}=\det[{\vec {e}}_{x_{i}},{\vec {e}}_{x_{j}},{\vec {e}}_{x_{k}}]\equiv \det[{\vec {e}}_{x_{i}},{\vec {e}}_{x_{j}},{\vec {e}}_{x_{k}}]\ ,\quad {\mathcal {E}}_{ijk}=\det[{\vec {b}}_{u_{i}},{\vec {b}}_{u_{j}},{\vec {b}}_{u_{k}}]={\sqrt {g}}\,\epsilon _{ijk}\ ,\quad {\mathcal {E}}^{ijk}=\det[{\vec {b}}_{u_{i}}^{\ *},{\vec {b}}_{u_{j}}^{\ *},{\vec {b}}_{u_{k}}^{\ *}]={\frac {1}{\sqrt {g}}}\,\epsilon ^{ijk}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/635c4dbe75507c440b35338f2a0a30dd5781b4e0)
![{\displaystyle {\frac {\partial {\vec {a}}}{\partial u_{k}}}=\sum \limits _{i=1}^{n}{\frac {\partial \left(a_{u_{i}}{\vec {e}}_{u_{i}}\right)}{\partial u_{k}}}=\sum \limits _{i=1}^{n}{\left[{\frac {\partial a_{u_{i}}}{\partial u_{k}}}{\vec {e}}_{u_{i}}+a_{u_{i}}{\frac {\partial {\vec {e}}_{u_{i}}}{\partial u_{k}}}\right]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f299be145e5e456967a8d7b8445a426b601502eb)
![{\displaystyle {\frac {\partial {\vec {a}}}{\partial u_{k}}}=\sum \limits _{i=1}^{n}{\frac {\partial \left({\tilde {a}}_{u_{i}}{\vec {b}}_{u_{i}}\right)}{\partial u_{k}}}=\sum \limits _{i=1}^{n}{\left[{\frac {\partial {\tilde {a}}_{u_{i}}}{\partial u_{k}}}{\vec {b}}_{u_{i}}+{\tilde {a}}_{u_{i}}{\frac {\partial {\vec {b}}_{u_{i}}}{\partial u_{k}}}\right]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/79406073ca48f4cc8ea78e5b60c76c60ef4fe4bd)







![{\displaystyle {\frac {\partial {\vec {a}}}{\partial u_{k}}}=\sum \limits _{i=1}^{n}\left[{\frac {\partial {\tilde {a}}_{u_{i}}}{\partial u_{k}}}{\vec {b}}_{u_{i}}+\sum _{j=1}^{n}{\tilde {a}}_{u_{i}}\Gamma _{ki}^{j}{\vec {b}}_{u_{j}}\right]=\sum \limits _{i=1}^{n}\left[{\frac {\partial {\tilde {a}}_{u_{i}}}{\partial u_{k}}}+\sum _{j=1}^{n}{\tilde {a}}_{u_{j}}\Gamma _{kj}^{i}\right]{\vec {b}}_{u_{i}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/79dcb4820c2333c86b10ba0cabc46ad88da5eb9b)














![{\displaystyle L_{\vec {w}}{\vec {a}}\equiv [{\vec {w}},{\vec {a}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5d573f1ba8d995311797e7dd27a368b42ff27d2)










![{\displaystyle {\frac {\partial {\vec {a}}}{\partial u_{k}}}=\sum \limits _{i=1}^{n}{\frac {\partial \left({\tilde {a}}_{u_{i}}^{\,*}{\vec {b}}_{u_{i}}^{\ *}\right)}{\partial u_{k}}}=\sum \limits _{i=1}^{n}\left[{\frac {\partial {\tilde {a}}_{u_{i}}^{\,*}}{\partial u_{k}}}-\sum _{j}{\tilde {a}}_{u_{j}}^{\,*}\Gamma _{ki}^{j}\right]{\vec {b}}_{u_{i}}^{\,*}\quad \Longrightarrow \quad \nabla _{u_{k}}{\tilde {a}}_{u_{i}}^{\,*}={\frac {\partial {\tilde {a}}_{u_{i}}^{\,*}}{\partial u_{k}}}-\sum _{j=1}^{n}{\tilde {a}}_{u_{j}}^{\,*}\Gamma _{ki}^{j}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6b7cf6dde8b9245a6031adc5894b7eb814852925)

![{\displaystyle \Gamma _{ij}^{k}=\left\{{\begin{array}{c}k\\ij\end{array}}\right\}\quad {\text{illetve}}\quad \Gamma _{ij,k}=\left[ij,k\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0aee4e0cb56fbef496415086a456d09d2d7a1888)





![{\displaystyle {\vec {v}}\times {\vec {w}}=\sum _{ijk}\epsilon _{ijk}v_{j}w_{k}{\vec {e}}_{i}^{\,*}=\sum _{ijk}\epsilon ^{ijk}v_{j}^{\,*}w_{k}^{\,*}{\vec {e}}_{i}\quad {\text{ahol}}\quad \epsilon _{ijk}=\epsilon ^{ijk}=\det[{\vec {e}}_{i},{\vec {e}}_{j},{\vec {e}}_{k}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0baff8043d2f9e8e3eab27a5c6867a7e7e453135)
![{\displaystyle {\mathcal {E}}_{ijk}=\det[{\vec {b}}_{u_{i}},{\vec {b}}_{u_{j}},{\vec {b}}_{u_{k}}]={\sqrt {g}}\,\epsilon _{ijk}\ ,\quad {\mathcal {E}}^{ijk}=\det[{\vec {b}}_{u_{i}}^{\ *},{\vec {b}}_{u_{j}}^{\ *},{\vec {b}}_{u_{k}}^{\ *}]={\frac {1}{\sqrt {g}}}\,\epsilon ^{ijk}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c2764b7e12c0185447d36eaa08fd7eb0973afbf)





![{\displaystyle {\begin{aligned}{\mathcal {E}}_{ijk}:=\det \!\left[{\frac {\partial {\vec {r}}}{\partial u_{i}}},{\frac {\partial {\vec {r}}}{\partial u_{j}}},{\frac {\partial {\vec {r}}}{\partial u_{k}}}\right]&=\det \!{\Biggl [}\sum _{l}{\frac {\partial x_{l}}{\partial u_{i}}}\underbrace {\frac {\partial {\vec {r}}}{\partial x_{l}}} _{{\vec {e}}_{l}},\sum _{m}{\frac {\partial x_{m}}{\partial u_{j}}}\underbrace {\frac {\partial {\vec {r}}}{\partial x_{m}}} _{{\vec {e}}_{m}},\sum _{n}{\frac {\partial x_{n}}{\partial u_{k}}}\underbrace {\frac {\partial {\vec {r}}}{\partial x_{n}}} _{{\vec {e}}_{n}}{\Biggr ]}\\&=\sum _{l,m,n}{\frac {\partial x_{l}}{\partial u_{i}}}{\frac {\partial x_{m}}{\partial u_{j}}}{\frac {\partial x_{n}}{\partial u_{k}}}\underbrace {\det \!\left[{\vec {e}}_{l},{\vec {e}}_{m},{\vec {e}}_{n}\right]} _{\epsilon _{lmn}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c397ee851b09754aaf567507da0aace2558681c2)










![{\displaystyle {\sqrt {\tilde {g}}}={\sqrt {EG-F^{2}}}=\left|{\vec {b}}_{u_{1}}\times {\vec {b}}_{u_{2}}\right|=\det \left[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},{\hat {n}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a50ce1b4df653e35c9ce6b51e739f713e8b4d8f)











![{\displaystyle h_{\alpha \beta }=-{\vec {e}}_{\alpha }\cdot \partial _{\beta }{\hat {n}}=-\partial _{\beta }\underbrace {({\vec {e}}_{\alpha }\cdot {\hat {n}})} _{=0}+{\hat {n}}\cdot \partial _{\beta }{\vec {e}}_{\alpha }={\hat {n}}\cdot \partial _{\beta }{\vec {e}}_{\alpha }={\frac {1}{\sqrt {{\tilde {g}}^{\,}}}}\det \left[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},\partial _{\beta }{\vec {e}}_{\alpha }\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e193d43e01330afc9714d31b66506553109a66bb)





























![{\displaystyle {\text{d}}V=\left|{\text{d}}{\vec {r}}_{u_{1}}\cdot \left({\text{d}}{\vec {r}}_{u_{2}}\times {\text{d}}{\vec {r}}_{u_{3}}\right)\right|=\left|\det[{\text{d}}{\vec {r}}_{u_{1}},{\text{d}}{\vec {r}}_{u_{1}},{\text{d}}{\vec {r}}_{u_{3}}]\right|=\left|\det[{\vec {b}}_{u_{1}},{\vec {b}}_{u_{2}},{\vec {b}}_{u_{3}}]\right|{\text{d}}u_{1}{\text{d}}u_{2}{\text{d}}u_{3}=\left|{\sqrt {g}}\right|{\text{d}}u_{1}{\text{d}}u_{2}{\text{d}}u_{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/391591bb604d4ba0eac4d6c1f33d4a86eb4f03bf)

![{\displaystyle {\text{d}}V=\left|\det[{\vec {e}}_{u_{1}},{\vec {e}}_{u_{2}},{\vec {e}}_{u_{3}}]\right|\left|h_{u_{1}}h_{u_{2}}h_{u_{3}}\right|{\text{d}}u_{1}{\text{d}}u_{2}{\text{d}}u_{3}=\left|{\sqrt {g}}\right|{\text{d}}u_{1}{\text{d}}u_{2}{\text{d}}u_{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/56edf417c905ca98da059630fb3480a1a5859f86)








![{\displaystyle {\begin{aligned}{\vec {\nabla }}\cdot {\vec {a}}&={\frac {1}{h_{u_{1}}h_{u_{2}}h_{u_{3}}}}\sum _{j=1}^{3}{\frac {\partial }{\partial u_{j}}}\left({\frac {h_{u_{1}}h_{u_{2}}h_{u_{3}}}{h_{u_{j}}}}a_{u_{j}}\right)\\&={\frac {1}{h_{u_{1}}h_{u_{2}}h_{u_{3}}}}\left[{\frac {\partial }{\partial u_{1}}}\left(h_{u_{2}}h_{u_{3}}a_{u_{1}}\right)+{\frac {\partial }{\partial u_{2}}}\left(h_{u_{1}}h_{u_{3}}a_{u_{2}}\right)+{\frac {\partial }{\partial u_{3}}}\left(h_{u_{1}}h_{u_{2}}a_{u_{3}}\right)\right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/462e86bf56f37042927523d352417dbb2351d0bd)

![{\displaystyle {\begin{aligned}\Delta \Phi &={\frac {1}{h_{u_{1}}h_{u_{2}}h_{u_{3}}}}\sum _{j=1}^{3}{\frac {\partial }{\partial u_{j}}}\left({\frac {h_{u_{1}}h_{u_{2}}h_{u_{3}}}{h_{u_{j}}^{2}}}{\frac {\partial \Phi }{\partial u_{j}}}\right)\\&={\frac {1}{h_{u_{1}}h_{u_{2}}h_{u_{3}}}}\left[{\frac {\partial }{\partial u_{1}}}\left({\frac {h_{u_{2}}h_{u_{3}}}{h_{u_{1}}}}{\frac {\partial \Phi }{\partial u_{1}}}\right)+{\frac {\partial }{\partial u_{2}}}\left({\frac {h_{u_{1}}h_{u_{3}}}{h_{u_{2}}}}{\frac {\partial \Phi }{\partial u_{2}}}\right)+{\frac {\partial }{\partial u_{3}}}\left({\frac {h_{u_{1}}h_{u_{2}}}{h_{u_{3}}}}{\frac {\partial \Phi }{\partial u_{3}}}\right)\right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5afa5b918c8337645bef87ae4780bbc4d85f7fb)




















![{\displaystyle {\begin{aligned}\operatorname {div} {\underline {\underline {S}}}&=\sum _{i,j,k}\partial _{k}[S^{ij}\,{\vec {b}}_{i}\otimes {\vec {b}}_{j}]\cdot {\vec {b}}^{~k}=\sum _{i,j,k}\left[\nabla _{k}S^{ij}\right]{\vec {b}}_{i}\otimes \underbrace {{\vec {b}}_{j}\cdot {\vec {b}}^{~k}} _{\delta _{j}^{k}}=\sum _{i,k}\left[\nabla _{k}S^{ik}\right]{\vec {b}}_{i}\\&=\sum _{i,j,k}\partial _{k}[S_{i}^{~j}\,{\vec {b}}^{~i}\otimes {\vec {b}}_{j}]\cdot {\vec {b}}^{~k}=\sum _{i,j,k}\left[\nabla _{k}S_{i}^{~j}\right]{\vec {b}}^{~i}\otimes \underbrace {{\vec {b}}_{j}\cdot {\vec {b}}^{~k}} _{\delta _{j}^{k}}=\sum _{i,k}\left[\nabla _{k}S_{i}^{~k}\right]{\vec {b}}^{~i}\\&=\sum _{i,j,k}\partial _{k}[S_{~j}^{i}\,{\vec {b}}_{i}\otimes {\vec {b}}^{~j}]\cdot {\vec {b}}^{~k}=\sum _{i,j,k}\left[\nabla _{k}S_{~j}^{i}\right]{\vec {b}}_{i}\otimes \underbrace {{\vec {b}}^{~j}\cdot {\vec {b}}^{~k}} _{g^{jk}}=\sum _{i,k}\left[\nabla _{k}S^{ik}\right]{\vec {b}}_{i}\\&=\sum _{i,j,k}\partial _{k}[S_{ij}\,{\vec {b}}^{~i}\otimes {\vec {b}}^{~j}]\cdot {\vec {b}}^{~k}=\sum _{i,j,k}\left[\nabla _{k}S_{ij}\right]{\vec {b}}^{~i}\otimes \underbrace {{\vec {b}}^{~j}\cdot {\vec {b}}^{~k}} _{g^{jk}}=\sum _{i,k}\left[\nabla _{k}S_{i}^{~k}\right]{\vec {b}}^{~i}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0de855d4603967fec4d22dd592f8f7c2e7d11f5d)






























![{\displaystyle u^{i}\in I^{i}:=[u_{0}^{i},u_{0}^{i}+\Delta u^{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c440d0e7610b5446d22a50ad9dbd7d3e720bac08)


![{\displaystyle \Delta V=\left|\det[{\vec {b}}_{1},{\vec {b}}_{2},{\vec {b}}_{3}]\right|\Delta u^{1}\Delta u^{2}\Delta u^{3}={\sqrt {g}}\,\Delta u^{1}\Delta u^{2}\Delta u^{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ab8e3a99276b491f660dfa7364f9f20037ac41e)







![{\displaystyle {\begin{aligned}\Phi _{1a}&=\int \limits _{(u^{2},u^{3})\in I^{2}\times I^{3}}\!\left[-\mathrm {d} {\vec {A}}^{\,1}\cdot {\vec {F}}\right]_{(u_{0}^{1},u^{2},u^{3})}=\int \limits _{u_{0}^{2}}^{u_{0}^{2}+\Delta u^{2}}\!\mathrm {d} u^{2}\int \limits _{u_{0}^{3}}^{u_{0}^{3}+\Delta u^{3}}\!\mathrm {d} u^{3}\left[-{\sqrt {g}}\,F^{1}\right]_{(u_{0}^{1},u^{2},u^{3})}\\&\approx \left[-{\sqrt {g}}\,F^{1}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{2}\Delta u^{3}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5c7b251feee03267407cf1b2af3f860d7db57cf1)

![{\displaystyle {\begin{aligned}\Phi _{1b}&=\int \limits _{(u^{2},u^{3})\in I^{2}\times I^{3}}\!\left[\mathrm {d} {\vec {A}}^{\,1}\cdot {\vec {F}}\right]_{(u_{0}^{1}+\Delta u^{1},u^{2},u^{3})}=\int \limits _{u_{0}^{2}}^{u_{0}^{2}+\Delta u^{2}}\!\mathrm {d} u^{2}\int \limits _{u_{0}^{3}}^{u_{0}^{3}+\Delta u^{3}}\!\mathrm {d} u^{3}\left[{\sqrt {g}}\,F^{1}\right]_{(u_{0}^{1}+\Delta u^{1},u^{2},u^{3})}\\&\approx \left[{\sqrt {g}}\,F^{1}\right]_{(u_{0}^{1}+\Delta u^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{2}\Delta u^{3}\approx \left[{\sqrt {g}}\,F^{1}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{2}\Delta u^{3}+\left[{\frac {\partial {\sqrt {g}}\,F^{1}}{\partial u^{1}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{1}\Delta u^{2}\Delta u^{3}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aa1230d1bd84dbb4c677198a4034d558efdc51dc)


![{\displaystyle \Phi _{1}=\Phi _{1a}+\Phi _{1b}=\left[{\frac {\partial {\sqrt {g}}\,F^{1}}{\partial u^{1}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{1}\Delta u^{2}\Delta u^{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44d56bbb205d59eda9a102c5e1185d06887ceeff)














![{\displaystyle [u_{0}^{1},u_{0}^{2}]{\xrightarrow[{\mathrm {d} {\vec {r}}={\vec {b}}_{1}\mathrm {d} u^{1}}]{\gamma _{1}}}[u_{0}^{1}+\Delta u^{1},u_{0}^{2}]{\xrightarrow[{\mathrm {d} {\vec {r}}={\vec {b}}_{2}\mathrm {d} u^{2}}]{\gamma _{2}}}[u_{0}^{1}+\Delta u^{1},u_{0}^{2}+\Delta u^{2}]{\xrightarrow[{\mathrm {d} {\vec {r}}={\vec {b}}_{1}\mathrm {d} u^{1}}]{\gamma _{3}}}[u_{0}^{1},u_{0}^{2}+\Delta u^{2}]{\xrightarrow[{\mathrm {d} {\vec {r}}={\vec {b}}_{2}\mathrm {d} u^{2}}]{\gamma _{4}}}[u_{0}^{1},u_{0}^{2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3aade1d40f655007278827bbec87fd88f2ca6e5f)







![{\displaystyle {\begin{aligned}\int _{\gamma _{1}+\gamma _{3}}\!{\vec {F}}\cdot \mathrm {d} {\vec {r}}&=\int \limits _{u_{0}^{1}}^{u_{0}^{1}+\Delta u^{1}}\!\left[F_{1}\right]_{(u^{1},u_{0}^{2},u_{0}^{3})}\mathrm {d} u^{1}+\int \limits _{u_{0}^{1}+\Delta u^{1}}^{u_{0}^{1}}\!\left[F_{1}\right]_{(u^{1},u_{0}^{2}+\Delta u^{2},u_{0}^{3})}\mathrm {d} u^{1}\\&=\int \limits _{u_{0}^{1}}^{u_{0}^{1}+\Delta u^{1}}\!\left(\left[F_{1}\right]_{(u^{1},u_{0}^{2},u_{0}^{3})}-\left[F_{1}\right]_{(u^{1},u_{0}^{2}+\Delta u^{2},u_{0}^{3})}\right)\mathrm {d} u^{1}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/82ae7db59f7bc73d1a0ba5711d5da04488b4e969)



![{\displaystyle \int _{\gamma _{1}+\gamma _{3}}\!{\vec {F}}\cdot \mathrm {d} {\vec {r}}\approx \int \limits _{u_{0}^{1}}^{u_{0}^{1}+\Delta u^{1}}\!\left(-\left[{\frac {\partial F_{1}}{\partial u^{2}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{2}\right)\mathrm {d} u^{1}=-\left[{\frac {\partial F_{1}}{\partial u^{2}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{2}\Delta u^{1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4fd9c7add8e7aa77e9e51e57dd74a5c897bbf9e1)
![{\displaystyle {\begin{aligned}\int _{\gamma _{2}+\gamma _{4}}\!{\vec {F}}\cdot \mathrm {d} {\vec {r}}&=\int \limits _{u_{0}^{2}}^{u_{0}^{2}+\Delta u^{2}}\!\underbrace {\left(\left[F_{2}\right]_{(u_{0}^{1}+\Delta u^{1},u^{2},u_{0}^{3})}-\left[F_{2}\right]_{(u_{0}^{1},u^{2},u_{0}^{3})}\right)} _{\approx \left[{\frac {\partial F_{2}}{\partial u^{1}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{1}}\mathrm {d} u^{2}\approx \left[{\frac {\partial F_{2}}{\partial u^{1}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{1}\Delta u^{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/59b158ab8e8f79c8b66fec592668443dea4221ba)

![{\displaystyle \oint \limits _{\partial (\Delta A)}\!{\vec {F}}\cdot \mathrm {d} {\vec {r}}\approx \left[{\frac {\partial F_{2}}{\partial u^{1}}}-{\frac {\partial F_{1}}{\partial u^{2}}}\right]_{(u_{0}^{1},u_{0}^{2},u_{0}^{3})}\Delta u^{1}\Delta u^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/97cf0e2454c320abc075f263d4416dfc6b9ecb62)

![{\displaystyle (\operatorname {rot} {\vec {F}})^{3}{\frac {1}{|{\vec {b}}^{\;3}|}}=\lim _{\Delta A\to 0}{\frac {1}{{\sqrt {g}}\,|{\vec {b}}^{\;3}|\,\Delta u^{1}\Delta u^{2}}}\left[{\frac {\partial F_{2}}{\partial u^{1}}}-{\frac {\partial F_{1}}{\partial u^{2}}}\right]\Delta u^{1}\Delta u^{2}\quad \implies \quad (\operatorname {rot} {\vec {F}})^{3}={\frac {1}{\sqrt {g}}}\left[\partial _{1}F_{2}-\partial _{2}F_{1}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e23c16251a83d91161e1d93e8084fbcb2a6708e)

































































































